


El esquema «Onboard EtherCAT» está destinado a los usuarios que pretendan hacer uso del protocolo maestro EtherCAT, configurado en uno de los puertos onboard Ethernet disponibles del PLC correspondiente.
Debido a los requisitos especiales de EtherCAT, es necesario modificar la configuración de los componentes del sistema relacionados con la placa Ethernet, y así proporcionar un puerto Ethernet de baja latencia. Además, se ajustan las prioridades de las distintas funcionalidades para reducir los efectos secundarios negativos en la tarea EtherCAT IEC y lograr el mejor rendimiento posible.
Funciones y sus prioridades
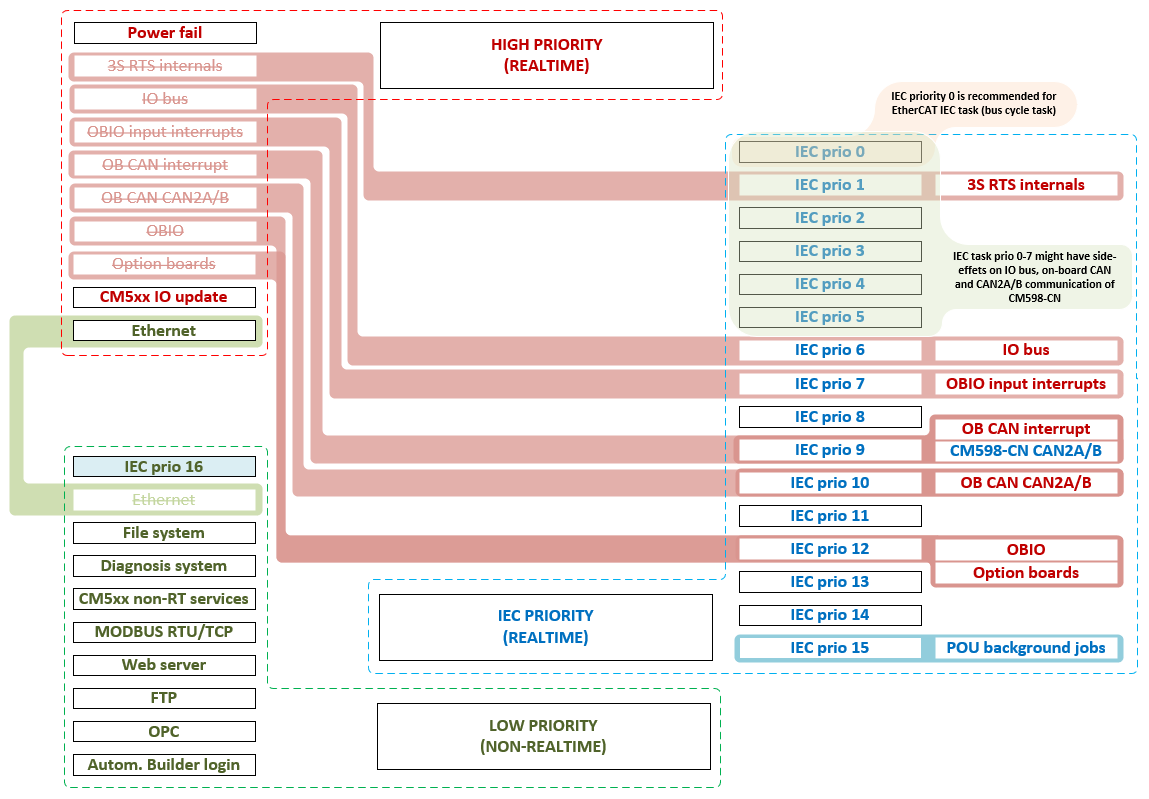
El siguiente diagrama muestra los cambios que el esquema aplica a las características disponibles del PLC. El objetivo principal de este esquema es reducir el número de tareas capaces de interrumpir o retrasar la tarea IEC de Ethernet, proporcionando al mismo tiempo la mayor flexibilidad posible. Utilizando el rango de prioridades de las tareas CEI, los usuarios pueden decidir si las tareas CEI existentes influirán en las características correspondientes.
-
Utilice la prioridad IEC 0 para la tarea IEC de EtherCAT y una prioridad inferior a 0 para el resto de funciones para evitar efectos secundarios negativos en EtherCAT.
-
Utilice las prioridades IEC de 1 a 5 para la funcionalidad que es más importante que las características de alta prioridad como bus IO o E/S a bordo.
-
Para garantizar que una función de alta prioridad no se vea influida por ningún código de usuario IEC (aparte de EtherCAT), utilice una prioridad de tarea IEC inferior a la prioridad de la función correspondiente.
No está prohibido hacer uso de las prioridades de tareas IEC asignadas a otras funcionalidades del PLC.
AVISO
Tenga cuidado al utilizar este esquema para evitar efectos secundarios no deseados en funciones distintas de EtherCAT, causados por la violación de restricciones o requisitos de temporización individuales.
El bus de E/S debe ser capaz de refrescar todos los dispositivos de E/S S500 conectados
en 20 ms. En caso contrario, se producirá una excepción que provocará la detención
de la aplicación. Utilice el comando shell del PLC io-bus desc para volcar información sobre la temporización del bus. La salida contiene información
sobre el tiempo de ciclo del bus IO:
--- Información del bus de E/S -
Velocidad en baudios [baud]: 1714286
Tiempo de ciclo mín. [us]: 1037
Tiempo de ciclo máx. [us]: 10936
Duración del último ciclo [us]: 1567
El tiempo de ciclo máximo debe ser muy inferior a 20 ms para garantizar que el sistema funcione de forma estable y no genere un error de excepción por tiempo de espera.
Si el tiempo de ciclo alcanza el límite, intente reducir la cantidad de código ejecutado por tareas de usuario IEC de mayor prioridad que el bus de E/S o ajuste las prioridades de las tareas si es posible.
Puerto de baja latencia
Además del ajuste de las prioridades de las tareas, el esquema «Onboard EtherCAT» también cambia la configuración del controlador de bajo nivel Ethernet para ofrecer al usuario un puerto dedicado de baja latencia.
|
Tipo de PLC |
ETH1 |
ETH2 |
|---|---|---|
|
PM50xx |
Baja latencia |
Mantenimiento y visualización |
|
PM56xx |
Mantenimiento y visualización |
Baja latencia |
El otro puerto permanece en prioridad baja para minimizar el impacto en la actividad del protocolo v. Está pensado para el inicio de sesión (Automation Builder), servicios de visualización o actividades similares (no en tiempo real).
Al configurar los parámetros de eCo CPU «Onboard EtherCAT», la interfaz ETH1 se establece en la dirección IP 0.0.0.0. Tras cambiar a un esquema de comunicación distinto de «Onboard EtherCAT», la configuración IP del puerto Ethernet utilizado para Onboard EtherCAT permanece invalidada (dirección IP 0.0.0.0). El usuario deberá volver a aplicarlo si la nueva aplicación necesita el puerto.
La funcionalidad «Onboard EtherCAT» sólo es utilizable/visible para la CPU eCo a partir de SystemFW 3.7.0.